车载高精定位技术的三大发展趋势
近年来,自动驾驶技术应用加速落地。无论是无人驾驶还是辅助驾驶,封闭或是开放场景,车辆都需要车道级的高精定位,以提前规划,顺畅地实现变道、转弯、掉头等操作,支持在各种路况环境下的安全平稳驾驶。车道级高精定位是实现自动驾驶功能的关键支撑。
在近日的“2023第四届软件定义汽车论坛暨AUTOSAR中国日”上,新纳传感高级副总裁卢炜结合行业现状,同与会者们分享了车载高精定位技术发展的三大核心趋势。

卢炜 | 新纳传感系统有限公司 高级副总裁
车道级定位整体架构和目前的实现方法
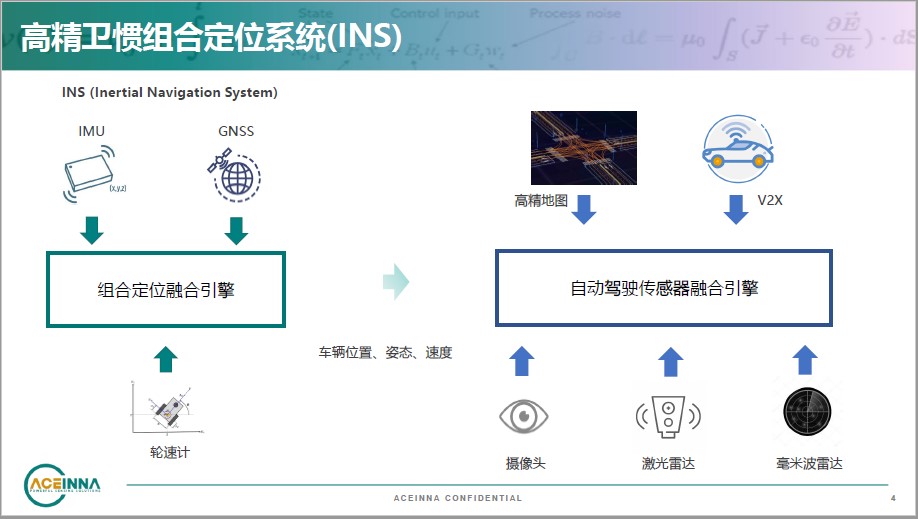
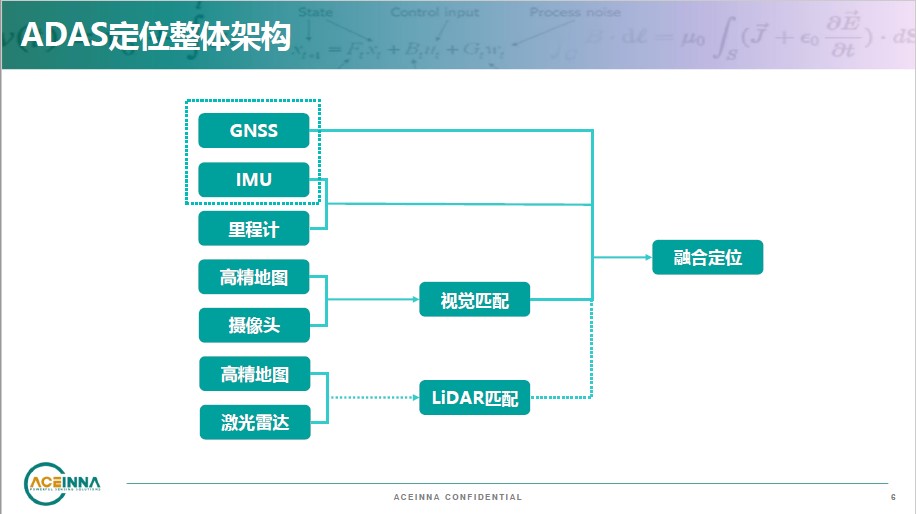
在谈到目前常见的定位系统架构时,卢炜解释道:“它是所有定位信息融合后的结果。下图的左侧为高精卫惯组合定位系统INS,其中包括惯性测量单元IMU、GNSS卫星定位模块及其配套的解算算法,这些模块目前通常整合在零部件级的卫惯组合定位盒子P-box中,并接入轮速计等辅助传感器的数据,最终输出融合的INS解。该子系统将车辆位置、姿态和速度等信息传输到智能驾驶域控制器中,在域控内部还会继续融合其他定位信息,如摄像头和激光雷达与高精地图的匹配解,最终将所有信息融合起来,形成一个完整的车辆定位和姿态结果。”
基于以上背景,我们认为车载定位技术未来会出现以下几大趋势:
趋势一:组合定位系统由P-box向贴片式模组演化
“我们认为,为了支持整车智驾系统更高程度的整合,零部件级别的组合定位子系统将被“打散”成模组。”
这其中有两个关键词,“模组化”及“贴片式”。

为什么要模组化?
“从整体视角去看,组合定位系统单独存在的必要性正在逐渐降低。”卢炜解释道,“正如以上提到,对于现在的智驾系统,真正完整的定位是融合了包含摄像头在内的各种传感器定位的结果。而过去的智驾域控制器架构里面并没有预留GNSS及IMU,所以这两个组件就只好合并起来,作为单独的零部件(P-box)存在,来满足当时的需求。”
“针对当时阶段性的需求,新纳也开发了自己的P-box产品,并取得了非常好的乘用车前装量产案例,出货量已达数万台。但我们更看好模组化的发展趋势,因此从三年前就提前做了布局。”卢炜补充到。
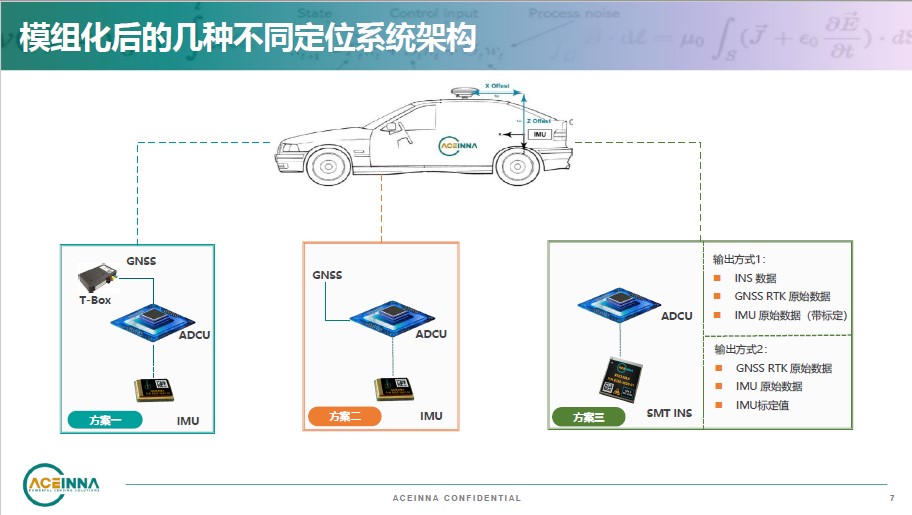
模组化后,会有更灵活的定位系统架构供选择。第一种架构只需在智驾域控内放置一个高精度IMU模组即可,GNSS信息可直接从T-box接收并在智驾域控内进行融合。第二种适用于智驾域控内已安装GNSS芯片的情况,在域控中再放置一个高精度IMU模组即可。第三种则是将IMU与GNSS组成的INS模组集成到域控内,以减少芯片模组数量,这些方式尽可能地简化了硬件配置且更灵活。
那么“贴片式”模组的优点有哪些?
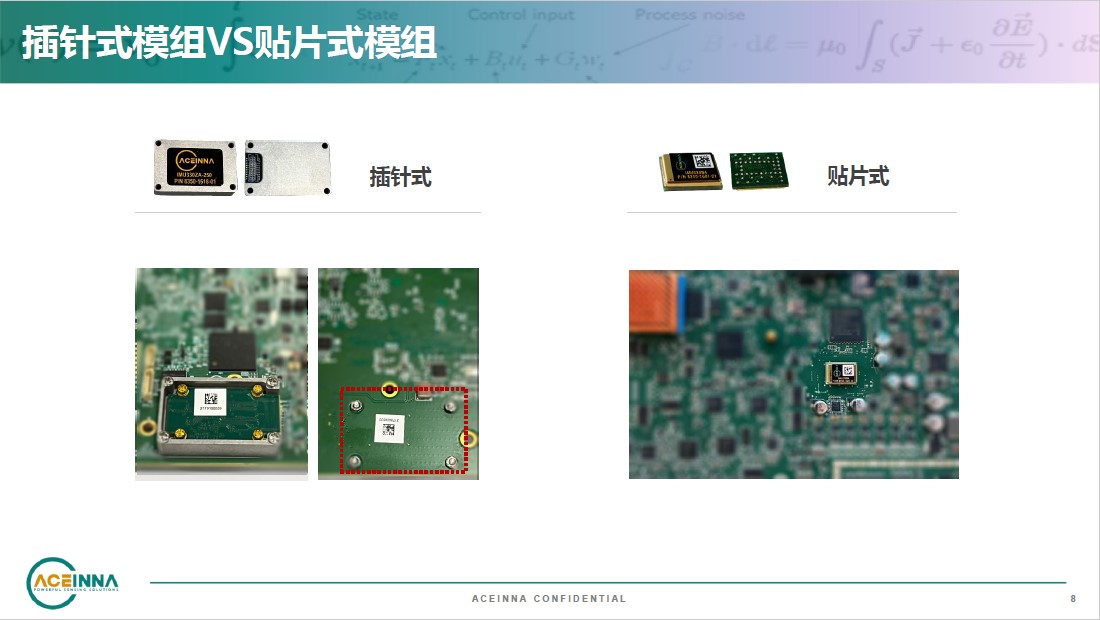
在高精度定位行业,插针式模组是目前更常见的。模组外部用坚固的铝合金壳封装,并通过插针固定在域控制器上。这样做的好处是,IMU是一种非常精密的传感器,对温度和振动都非常敏感。而铝合金壳能隔绝外部干扰,更易于保证IMU的性能。
但这种方式也带来了明显的限制,插针式模组集成到智驾域控制器的电路板上非常麻烦,需要打螺柱或螺钉,有时甚至需要打通孔并在背面放置螺帽。这与电路板上的大部分用表面贴装工艺即可集成的芯片和模组很不同,会大幅降低生产效率;另外插针式的接口在车辆经历较强振动时,也容易造成接触不良而丢失数据的情况。
相比之下,贴片式模组的集成简便很多。贴片式模组可通过回流焊工艺直接贴在域控制器电路板上。大幅提高生产效率和保证质量。
虽然贴片式模组有诸多优点,但仍有困难需要克服。
首先是温度问题。随着智能驾驶域控制器算力不断提高,域控制器内部温度变化也变得更剧烈。IMU作为对温度非常敏感的传感器,在未经精密校准时测量偏移会随着温度变化而改变,因此需要对每个IMU芯片进行大量的校准工作来抵消温度剧烈变化带来的性能漂移。第二个问题是贴片回流焊工艺带来的应力变化。回流焊焊点从高温冷却固化时会给电路板造成额外的应力。高精度IMU对外部应力非常敏感的,因此需要通过精巧的结构设计和后期处理算法抵消应力影响。
除了温度和回流焊应力之外还有一些挑战,比如振动、电磁干扰、提高集成度等等。卢炜分享道,新纳基于二十多年技术积累,已一一攻克上述难点,成功研发并量产了贴片式IMU模组及INS模组,积累了丰富的项目落地经验。
“新纳贴片式IMU模组目前已经经过了前装量产项目的验证,我们针对贴片式IMU模组在经历回流焊前后的性能做了对比:结果显示,即便经过高温回流焊、冷却和应力残留等阶段,陀螺仪、加速度计的零偏不稳定性、角度随机游走等重要参数仍然可以被控制在很小的变化范围内,仍然能够支持L2+级别的NOA、NGP等应用。”

据卢炜介绍,除了IMU模组,新纳融合了GNSS+IMU的INS模组也有量产案例。
“例如新纳的RTK330LA,这款贴片式INS模组已经应用于国内领先智能驾驶卡车的域控制器上,已经支持客户商业化运营近3000万公里,其可靠性和性能达到了行业主流水平,与目前市场上其他零部件级P-box产品不相上下,甚至在某些方面更具领先优势。同时,在近3000万公里的商业化运营中,该产品在稳定性、可靠性和抗电磁干扰等方面表现优秀。”

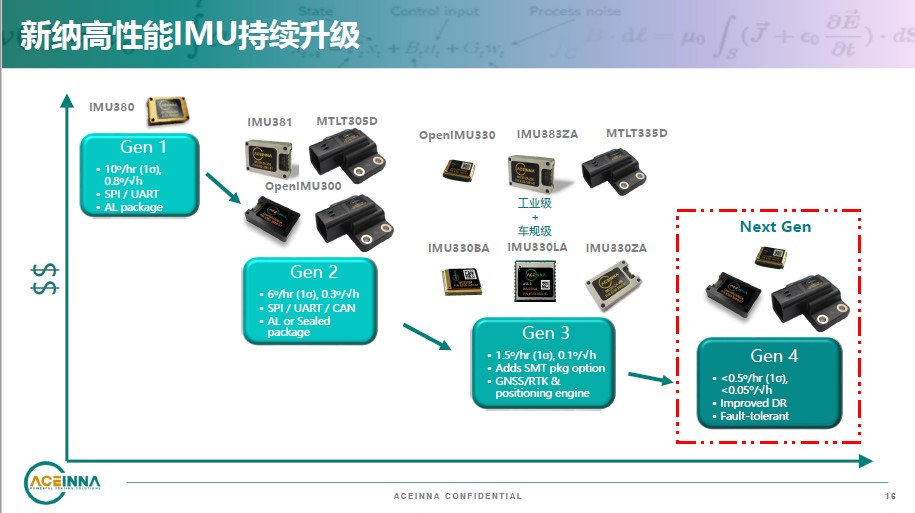
趋势二:IMU性能持续提升
“我们认为,IMU传感器在整个定位系统中具有非常独特的地位,因此需要不断提升其性能。”

智能驾驶车辆上所有可用的传感器中,IMU是唯一一个不受外界环境影响,在各种天气、光照、路况条件下都能正常工作的传感器。但其有一个天生的缺点,它只能直接测量加速度和角速度,由此推算出的车辆的位移由其累加得来,而微小的测量误差会被不断累加放大。这是无法避免的特性问题,只能用硬科技来解决。
“在过去几年,新纳一直在不断升级IMU性能,目我们IMU的零偏不稳定性已经改善了近一个数量级,达到1.5度/小时,基本能满足目前L2+自动驾驶高精定位要求。”卢炜表示,目前新纳下一代自研IMU芯片正在开发过程中,性能会进一步大幅提升。
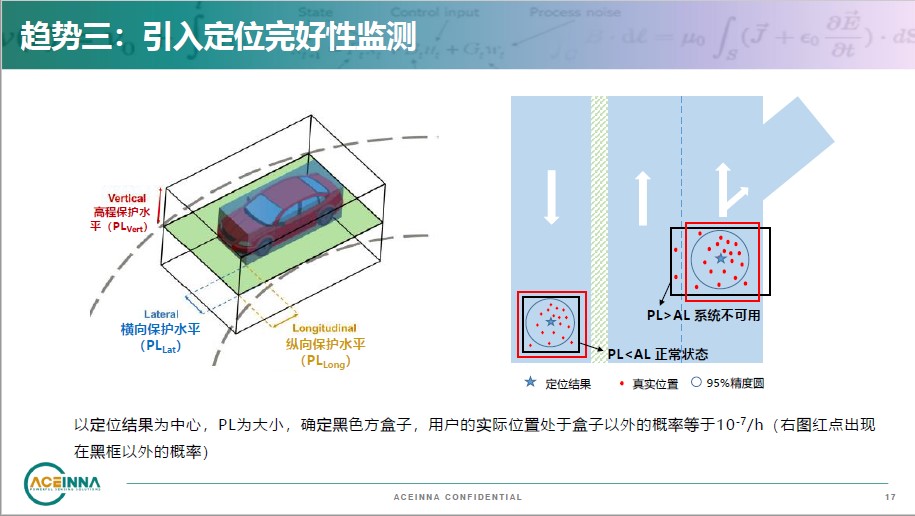
趋势三:引入定位完好性监测
定位完好性是此前行业内基本未涉及的概念,简而言之就是使INS有了“自知之明“,在给出定位结果的同时,也给出了该结果的置信程度,同时通过定位完好性监测算法就可以提前预警上级系统。
据悉,新纳在定位完好性方面应用属于行业首创,目前已经引入到新纳INS模组和P-box相关产品中。
新纳传感扎根中国,布局全球
新纳传感总部位于无锡,并设有研发和生产基地,在波士顿、芝加哥及硅谷设有全球研发中心。新纳脱胎于美新半导体,主要生产加速度计,并逐渐将能力拓展到整个IMU和定位模组、定位系统等领域;2017年,新纳从美新半导体独立出来,凭借在惯性传感器领域20多年丰富经验,专注于为汽车、工业等领域提供高性能定位解决方案。新纳拥有强大的研发实力及制造能力, 70%以上都是研发人员,具备全方位的温度补偿和校准能力,并拥有丰富的合规和量产经验,目前惯性导航产品累计出货量超100万件,在行业内处于领先地位。未来,新纳将继续发挥产品及技术优势,赋能各个行业快速发展。
关于新纳传感系统有限公司
新纳传感系统有限公司是全球领先的MEMS传感解决方案提供商,产品线包括基于磁阻薄膜的高频率高带宽电流传感器、高性能代码开源惯性测量单元(IMU)、高精度实时动态(RTK)导航系统和厘米级精度定位服务。公司在中国无锡设有研发与生产基地,并在波士顿、芝加哥和硅谷设有全球研发中心。请访问新纳官网www.aceinna.cn了解更多信息。
ACEINNA, INC.
Add.: 3 Highwood Drive, Suite 101W, Tewksbury, MA 01876
Tel.: 978-965-3200
新纳传感系统有限公司
地址: 无锡市新吴区菱湖大道111号 无锡软件园天鹅座C栋25楼
电话: 0510-88088001
